
Die Migration der Robotermodelle A/B nach ROS Noetic ist etwas aufwendiger als die vergangenen ROS Distributionen. Der größte Sprung ist hier eindeutig von Python 2.7 zu Python 3. Deshalb dauert es auch bei Drittanbietern von ROS-Software etwas länger, ihre Programme umzustellen. Wer den Sprung aber erst Mal gemacht hat, ist auch für ROS 2 besser vorbereitet, da dort die Python-Version 3 Standard ist.
Archiv des Jahres: 2020
2 Beiträge
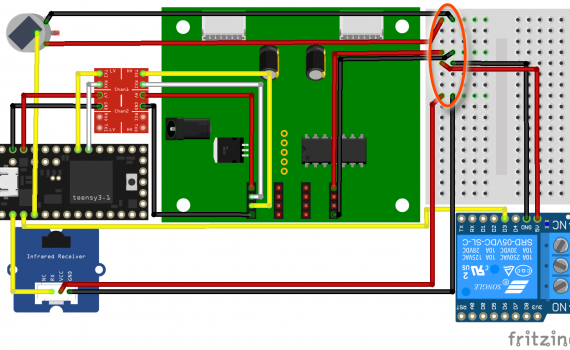
In der folgenden Abbildung sind die rot eingerahmten Stromversorgungskabel falsch verkabelt. Auf dem Steckbrett von Fritzing verlaufen die Verbindungen intern horizontal, nicht vertikal. In Wirklichkeit gibt es Steckbretter, deren interne Verbindungen entweder vertikal oder horizontal verlaufen. Es ist ratsam, zuvor den Verlauf der internen Verbindungen zu prüfen, bevor man die Kabel aufsteckt. Ein LED-Test ist ein einfaches Beispiel, um die richtige Verkabelung herauszufinden.