
NVIDIA Jetson Nano Developer Kit Auf der Suche nach einem Kleinstrechner für den Einsatz in kompakten Systemen oder Robotern viel mir endlich ein Jetson Nano in die Hände. Vor einigen Jahren ist man erst gar nicht an ein Jetson Nano rangekommen bzw. nur durch einen aufwendigen Registrierungsprozess und einem Wohnsitz […]
Murat Calis
4 Beiträge
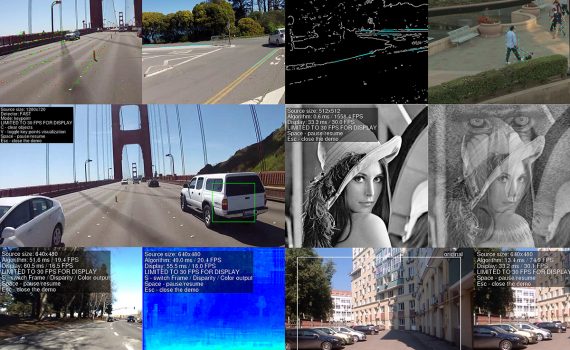
In diesem Beitrag möchte ich mein Jetson Nano B01 mit DeepLearning-Algorithmen ausreizen. Bisher habe ich ein Custom Image mit XUBUNTU auf dem Jetson Nano verwendet. Leider wird das genannte Image von NVIDA offiziell nicht unterstützt. Dabei entstehen Kompatibilitätsprobleme mit anderen Software-Bibliotheken. Beispielsweise verhindert eine ROS Noetic-Installation auf einem Custom Image […]

Die Migration der Robotermodelle A/B nach ROS Noetic ist etwas aufwendiger als die vergangenen ROS Distributionen. Der größte Sprung ist hier eindeutig von Python 2.7 zu Python 3. Deshalb dauert es auch bei Drittanbietern von ROS-Software etwas länger, ihre Programme umzustellen. Wer den Sprung aber erst Mal gemacht hat, ist auch für ROS 2 besser vorbereitet, da dort die Python-Version 3 Standard ist.
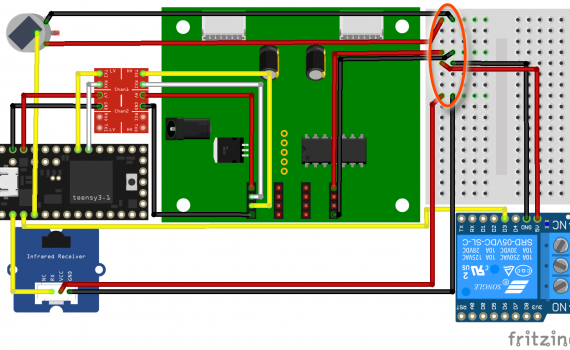
In der folgenden Abbildung sind die rot eingerahmten Stromversorgungskabel falsch verkabelt. Auf dem Steckbrett von Fritzing verlaufen die Verbindungen intern horizontal, nicht vertikal. In Wirklichkeit gibt es Steckbretter, deren interne Verbindungen entweder vertikal oder horizontal verlaufen. Es ist ratsam, zuvor den Verlauf der internen Verbindungen zu prüfen, bevor man die Kabel aufsteckt. Ein LED-Test ist ein einfaches Beispiel, um die richtige Verkabelung herauszufinden.