
NVIDIA Jetson Nano Developer Kit Auf der Suche nach einem Kleinstrechner für den Einsatz in kompakten Systemen oder Robotern viel mir endlich ein Jetson Nano in die Hände. Vor einigen Jahren ist man erst gar nicht an ein Jetson Nano rangekommen bzw. nur durch einen aufwendigen Registrierungsprozess und einem Wohnsitz […]
ROS
5 Beiträge
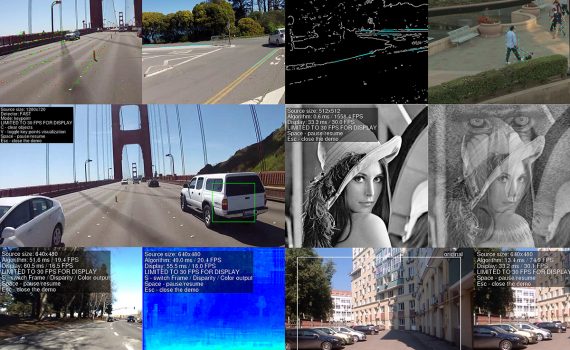
In diesem Beitrag möchte ich mein Jetson Nano B01 mit DeepLearning-Algorithmen ausreizen. Bisher habe ich ein Custom Image mit XUBUNTU auf dem Jetson Nano verwendet. Leider wird das genannte Image von NVIDA offiziell nicht unterstützt. Dabei entstehen Kompatibilitätsprobleme mit anderen Software-Bibliotheken. Beispielsweise verhindert eine ROS Noetic-Installation auf einem Custom Image […]

Die Migration der Robotermodelle A/B nach ROS Noetic ist etwas aufwendiger als die vergangenen ROS Distributionen. Der größte Sprung ist hier eindeutig von Python 2.7 zu Python 3. Deshalb dauert es auch bei Drittanbietern von ROS-Software etwas länger, ihre Programme umzustellen. Wer den Sprung aber erst Mal gemacht hat, ist auch für ROS 2 besser vorbereitet, da dort die Python-Version 3 Standard ist.

In RViz können Sensordaten visualisiert werden. Als 3D-Modell soll der Bioloid Robotor in URDF - Unified Robot Description Format erstellt werden. URDF ist ein XML-Format wobei die Endung .xml einfach in .urdf umbenannt wird, die Umbenennung jedoch nicht zwingend ist, wenn man mit .launch-Dateien oder RViz arbeitet. XML ist eine Beschreibungssprache ähnlich HTML aus der SGML-Familie. Das Hauptmerkmal von XML ist die Fehlerfreiheit im Gegensatz zu HTML, wo Fehler erlaubt sind und aufwendig vom Browser korrigiert werden. Ein XML-Dokument ist wohlgeformt, wenn jedes öffnende "Tag" ein schließendes "Tag" hat. Es kann nur ein einzelnes Wurzelelement in einem XML-Baum geben.
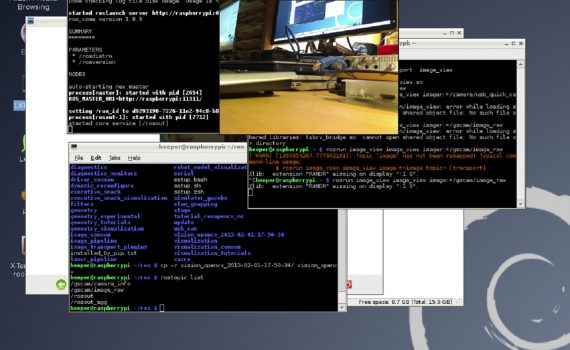
Hier sind, Erfahrungen mit der Installation von ROS-Fuerte auf einem Raspberry Pi Modell B mit 512MByte Arbeitsspeicher. Eine Installationsanleitung auf www.ros.org für ROS-Fuerte auf einem Raspberry Pi war zu der Zeit nicht verfügbar. Die Installation basiert auf der Anleitung für Debian-Systeme. Ein grober Fehler, der passiert ist, war das Überspringen eines gesamten Installationsschrittes. Trotzdem habe ich das Installations-Protokoll nicht korrigiert, denn Fehler passieren, und es ist trotzdem möglich, ein ROS-Desktop (ohne rviz, PCL) + ffmpeg0.6.6 + OpenCV 2.4.3 auf einen Raspberry Pi zu kompilieren. Die Gesamt-Installation und -Konfiguration dauert Tage...